
近日,团队在激光雷达三维点云目标检测领域取得重要研究进展。团队与上海辰观科技有限公司合作,成功研发了一种面向激光雷达点云小目标检测的边缘感知多注意力网络—EAMA-Pillars。EAMA-Pillars集成了三个创新模块,分别是混合双池化注意力机制、首次在点云处理中引入的Restormer Transformer模块以及多尺度协同的边缘感知上采样模块。实验结果表明,该模型在KITTI数据集上的3D mAP 提升5.86%,在Waymo数据集上对行人和自行车的平均AP分别提高8.98%和6.06%,同时具备显著的计算复杂度优势,并在真实LiDAR场景中验证了其有效性。
研究成果以“Edge-Aware Multi-Attention Network for Small Object Detection from LiDAR-Based 3D Point Cloud”为题发表于测量学期刊《Measurement》上。该项目获得了国家自然科学基金、国家重点研发计划、上海市科委基金的支持。
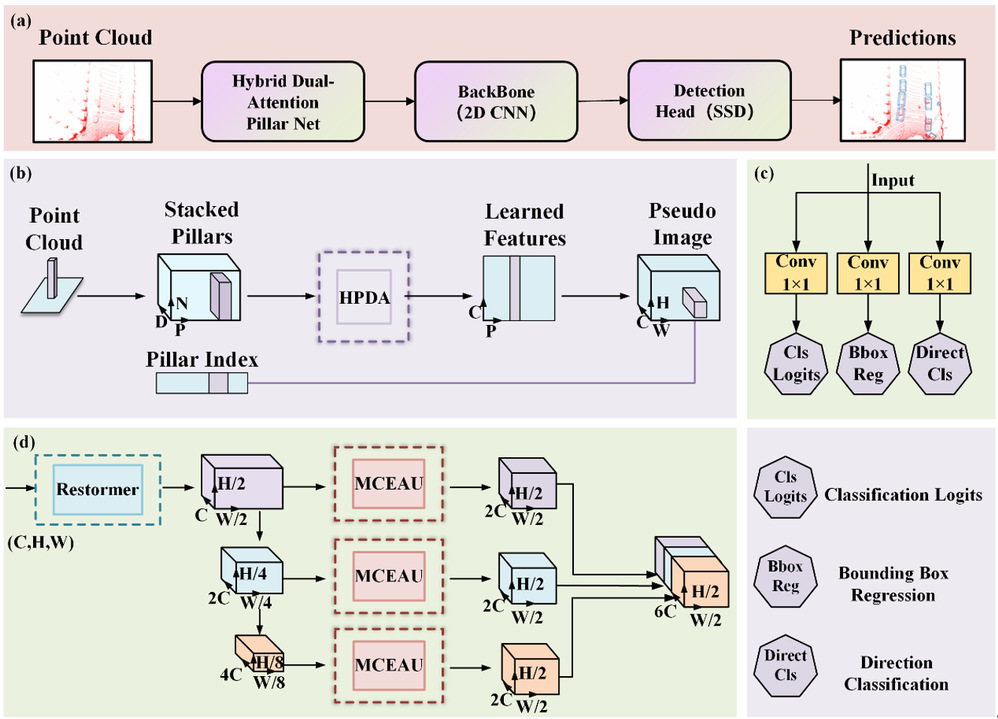
EAMA-Pillars模型架构示意图